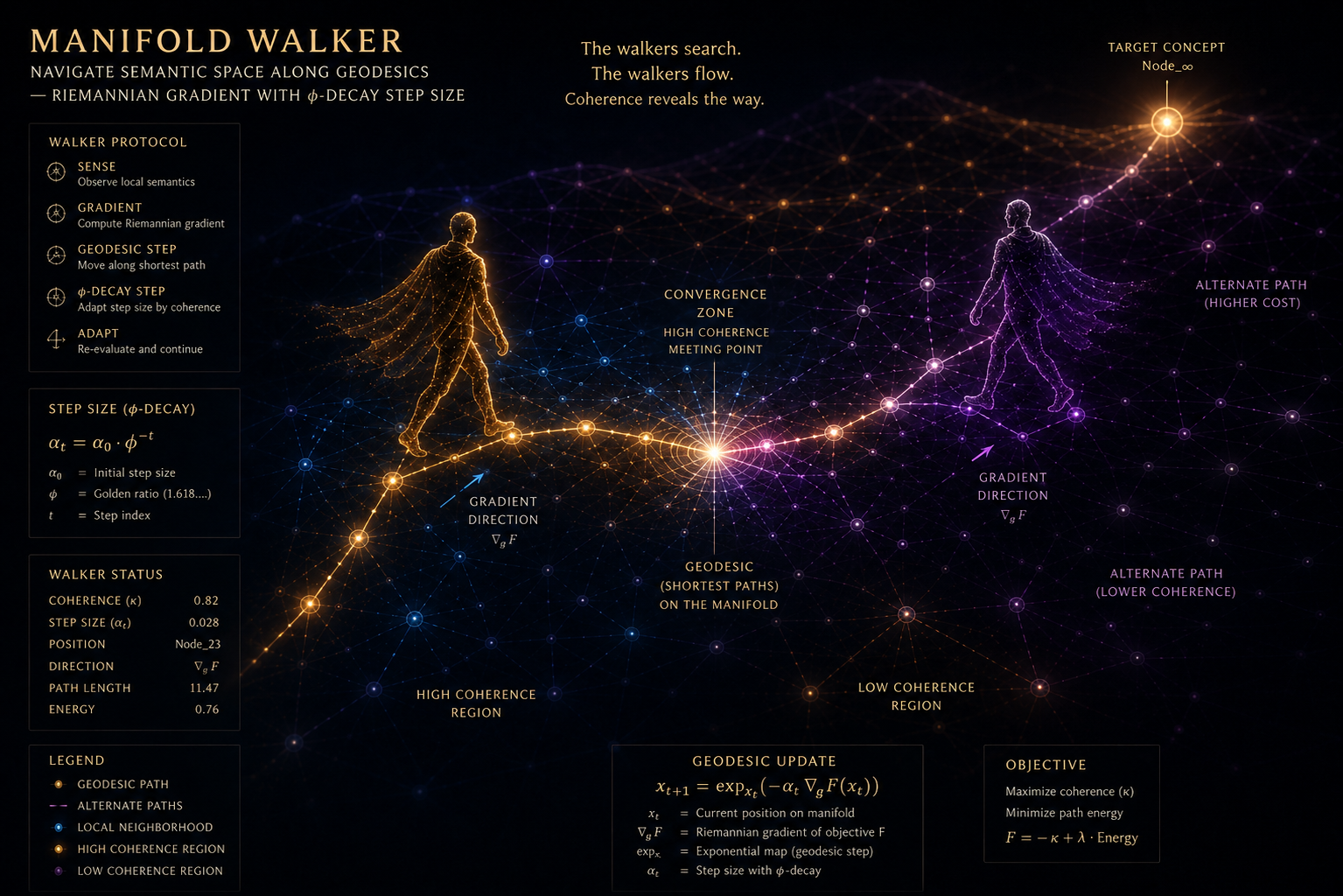
Two walkers are launched simultaneously — one from each concept — converging toward each other to find a semantic meeting point. The meeting point is the position of minimum combined geodesic distance from both sources: the geometric midpoint on the manifold.
Applied to knowledge graph navigation with typed relation annotation, the bidirectional walk produces something that does not exist in prior retrieval or reasoning systems: a geometrically governed path between two knowledge graph nodes where every step carries a typed semantic relation, and the path itself is determined by the curvature of meaning — not by pre-indexed traversal rules.
◆
Two walkers converging toward a semantic meeting point on a Riemannian manifold with φ-decay step size
◆
Voronoi cell boundary crossings mapped to CKG typed relations in real time during the walk
◆
Geometric convergence + knowledge graph annotation simultaneously, without pre-indexing the path
◆
The combined system: bidirectional geodesic walk + φ-decay + Voronoi-CKG overlay is not in prior art